Inżynier i Fizyk Medyczny 3/2015 vol. 4
145
artykuł
/
article
radioterapia
/
radiotherapy
3D wykonanym podczas symulacji. Pozwala to na obliczenie kory-
gujących przesunięć stołu. Następnie system wchodzi w fazę cią-
głego monitorowania położenia prostaty. Pierwszy skan jest trak-
towany jako referencyjny. Algorytm znormalizowanej korelacji
krzyżowej, porównując wartości intensywności pikseli w granicy
2 cmod prostaty, szuka optymalnego dopasowania pomiędzy ob-
razem bieżącym a referencyjnym. Dopasowanie jest ograniczone
do 6° swobody tj. translacji i rotacji, wyłączając deformacje.
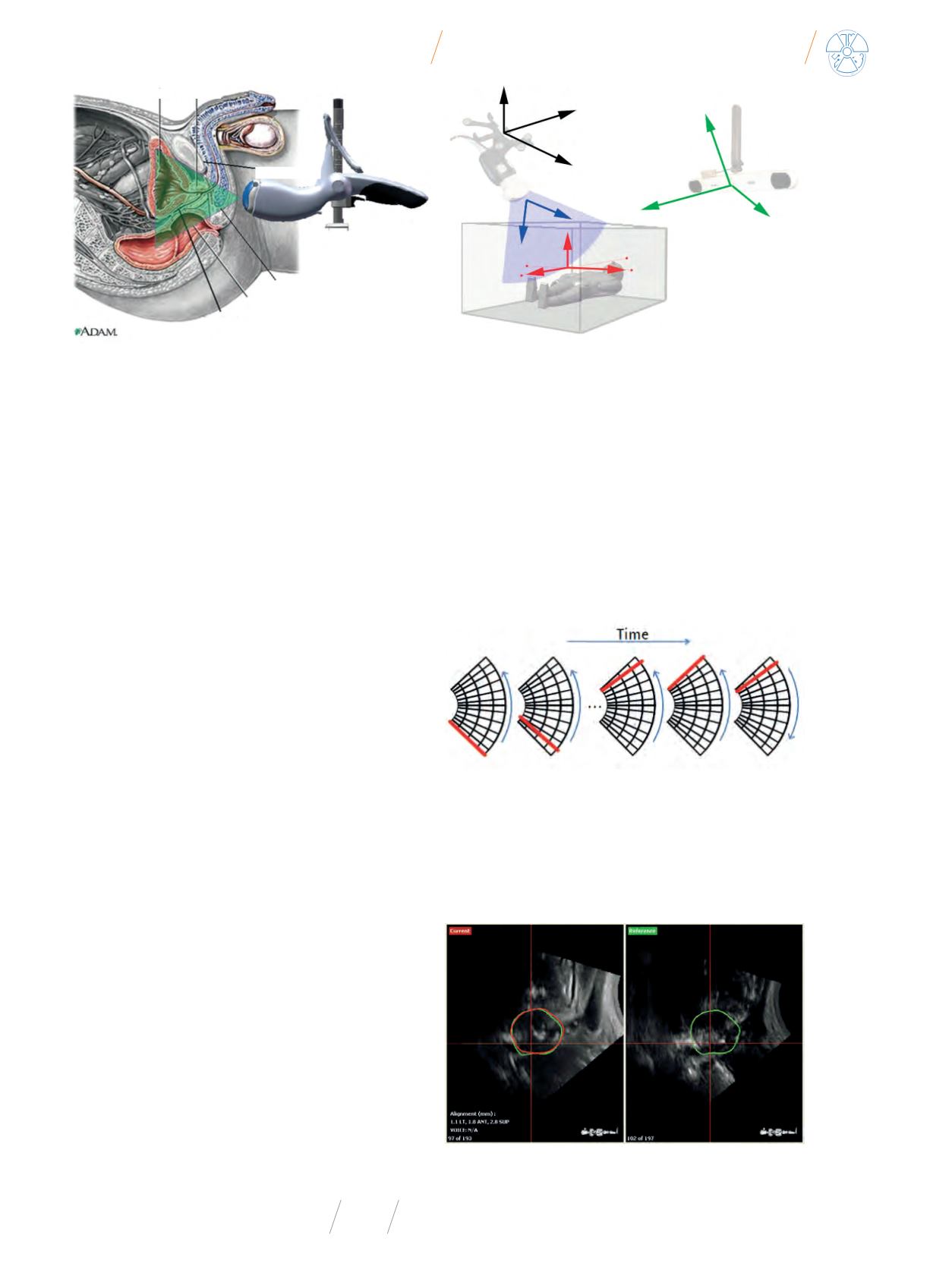
Akwizycja obrazu USG odbywa się w cylindrycznym układzie
współrzędnych (Rys. 4).
Aby skrócić czas obliczeń w fazie monitorowania, pomijany
jest etap rekonstrukcji 3D i obrazy są bezpośrednio porówny-
wane do siebie. Dzięki temu czas każdego dopasowania wynosi
0,7 sekundy. Podczas monitorowania wyświetlany jest bieżący
obrys prostaty oraz obrys referencyjny (Fot. 1).
Rys. 2
. Schemat ułożenia automatycznej głowicy USG
Źródło: Manual produktowy [18].
Rys. 3
. Schemat układów współrzędnych systemu
Źródło: Manual produktowy [18].
Fot. 1
. Przykład bieżącego położenia prostaty względem skanu referencyjnego
Źródło: Manual produktowy [18].
Głowica USG leży pomiędzy nogami pacjenta, dotykając kro-
cza, znajduje się poza wiązką promieniowania (Rys. 2).
Dzięki małej odległości pomiędzy kroczem a prostatą uzy-
skujemy wysoką jakość obrazu. Automatyczna głowica skanuje
w sposób ciągły obszar zainteresowania, omiatając 75° łuk w cią-
gu 0,5 sekundy. Pacjent nie odczuwa żadnego ruchu tylko deli-
katne wibracje, gdyż cały ruch jest wewnątrz obudowy głowicy.
Głowica posiada zintegrowany czujnik naprowadzający, który
uruchamia się, gdy wiązka USG przechodzi przez środek głowi-
cy. Pozwala to sprawdzić pozycję geometryczną w każdym cyklu
skanowania.
Lachaine i Falco zaproponowali wolniejszy tryb skanowania
USG – 45° łuk w ciągu 2,5 sekundy, co zwiększa rozdzielczość ob-
razowania do 0,4°, czego efektem jest rozdzielczość 0,35 mm na
głębokości 5 cm.
Automatyczna głowica USG jest przymocowana do podstawy,
która może być indeksowana zarówno do stołu TK, jak i stołu
aparatu radioterapeutycznego. System posiada 4 markery pod-
czerwieni, umożliwiając określanie pozycji i orientacji głowicy
przez system śledzenia.
Precyzja pomiaru wynika z zależności układów współrzęd-
nych składników systemu zlokalizowanych w pomieszczeniu
skanera TK oraz bunkrze akceleratora. Możemy zdefiniować
4 powiązane ze sobą układy współrzędnych systemu: układ
współrzędnych pomieszczenia, układ współrzędnych systemu
śledzenia, układ współrzędnych ramki USG 2D i układ współ-
rzędnych zdefiniowany markerami głowicy USG (Rys. 3).
System Clarity musi być wykalibrowany odpowiednio do
współrzędnych pomieszczenia TK i bunkra. Umożliwia to rela-
cję między każdym pikselem USG i jego odpowiednią pozycją
w przestrzeni. Procedurę kalibracji przeprowadza się, wykonu-
jąc skany TK i USG fantomu, który zawiera pręty i kulki w znanych
położeniach.
Lachaine i Falco testowali system Clarity z ruchomym fanto-
mem. Różnica pomiędzy zmierzonym a zaprogramowanym ru-
chem mieściła się w granicach 1 mm przez 95% czasu [9].
Przed każdą frakcją radioterapii wykonywany jest pełny skan
USG 3D, a obrazy są porównywane z referencyjnym skanem USG
Rys. 4
. Schemat cylindrycznego układu skanowania USG
Źródło: [9].
Opuszka prącia
Pęcherz Prostata
Pęcherzyki nasienne
Odbytnica
Kość łonowa


