Inżynier i Fizyk Medyczny 2/2015 vol. 4
91
artykuł
/
article
radioterapia
/
radiotherapy
Przyjęte metody detekcji prowadzą do dwóch różnych podejść
wykrywania zmiany wartości pikseli w profilu:
1.
Detekcja gradientu – wykrywanie krawędzi na podstawie
pochodnych profilu.
2.
Detekcja intensywności – wykrywanie krawędzi na podsta-
wie wartości skrajnych w profilu.
Wyodrębnienie kilku równoległych profili i detekcja w nich
krawędzi pozwala na wykrycie linii w obrazie, które przecinają
te profile. W ten sposób mogą zostać określone i połączone linią
punkty znajdujące się na krawędzi pola.
Rys. 6
Idea detekcji krawędzi
Źródło: [2].
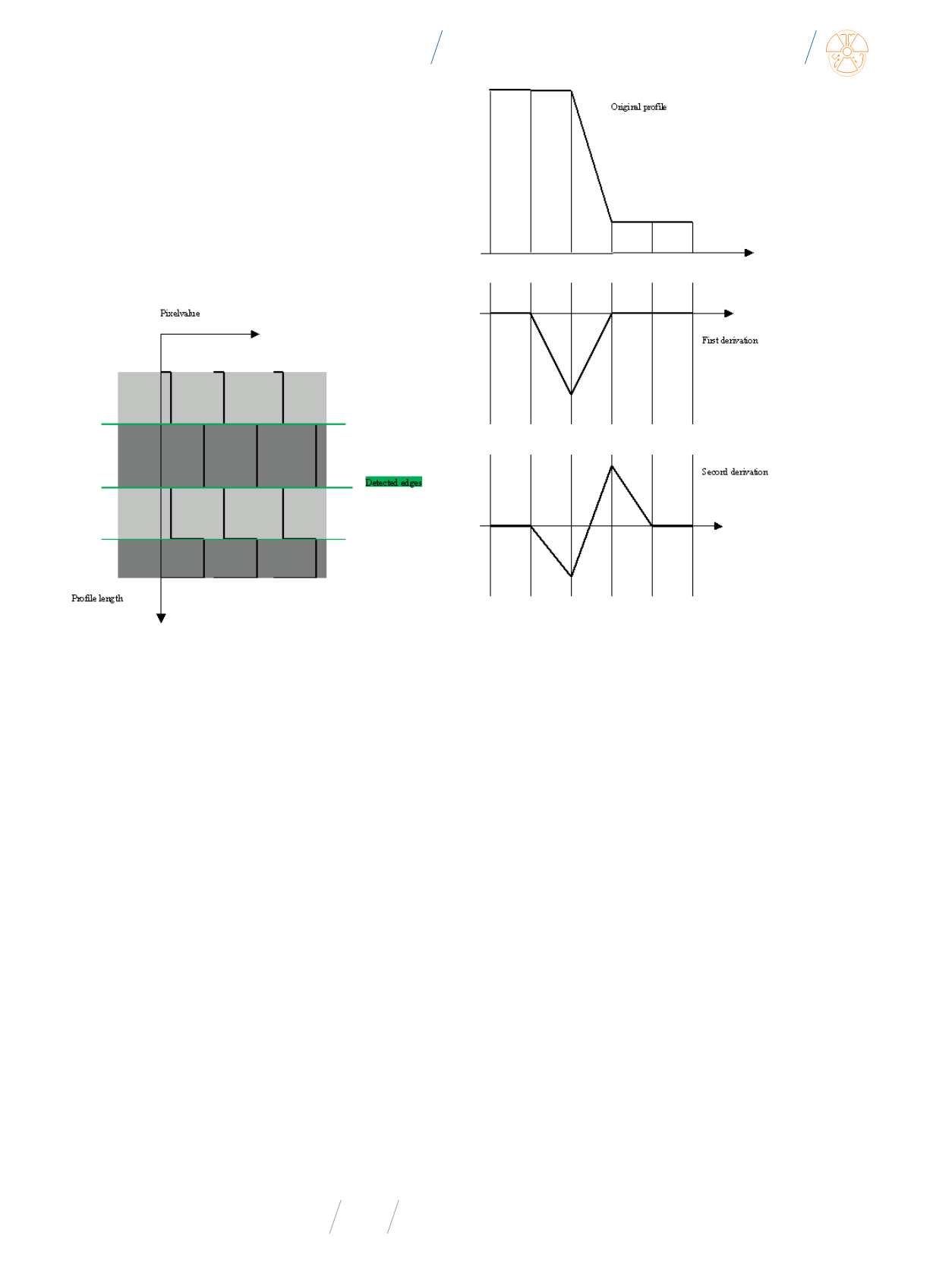
Metoda detekcji gradientu opiera się na tym, że krawędź znaj-
duje się w miejscu przejścia przez zero drugiej pochodnej liczo-
nej dla profilu. Przejście przez zero drugiej pochodnej wskazuje
lokalizację ekstremalnych wartości krzywizny. Pierwszą pochod-
ną oblicza się na podstawie wzoru:
′
( )
= +
( )
−
( )
f i
f i
f i
1
Druga pochodna obliczana jest następująco:
′′
( )
= +
( )
− −
( )
− ∗
( )
f i
f i
f i
f i
1
1 2
W przypadku opisywanego systemu pierwsza pochodna jest
przesunięta w lewo o 0,5 piksela, ponieważ wzór nie jest syme-
tryczny. Ta asymetryczna formuła została wybrana, ponieważ
jest mniej czuła na szum w obrazie.
Krawędzie są określane w kilku etapach:
Pierwsza pochodna jest wygładzana ze średnią kroczącą.
Skrajne wartości w pierwszej pochodnej są określone w za-
leżności od odchylenia standardowego wartości pikseli w ob-
razie (przejścia przez zero w drugiej pochodnej są skrajnymi
wartościami w pierwszej pochodnej). W metodzie przyjęto, że
krawędź musi mieć zmianę gradientu trzy razy sigma obrazu.
Zapewnia to obszar, w którym krawędź będzie właściwie zlokali-
zowana. Wartość zerowa drugiej pochodnej jest przeszukiwana
w tym obszarze najpierw w prawo (ponieważ pierwsza pochod-
na jest przesunięta w prawo – patrz wyżej), a następnie w lewo.
Położenie krawędzi jest określane przez interpolację liniową po-
między dwoma punktami, z przeciwnym znakiem. Zapewnia to
jej detekcje z dokładnością subpikseli.
Pierwsza pochodna jest wprawdzie mniej wrażliwa na szumy
niż druga, niemniej opisane algorytmy wykazują na nie dużą
wrażliwość. Dodatkowo stosunek sygnału do szumu może być
dość niekorzystny dla detekcji krawędzi (około 3,0-2,5:1 w ob-
razach, w których krawędzie nie są określane na podstawie
listków, ale przez druty wolframowe itp.), co może powodo-
wać znaczne różnice uzyskanych wyników w poszczególnych
obrazach. Z tego powodu w obliczeniach dla obrazów stosuje
się progową wartość krawędzi. Metodologicznie oznacza to, że
obliczana jest wartość odchylenia standardowego dla wartości
pikseli. Należy zwrócić uwagę, że obszar, dla którego określa się
odchylenia standardowe, jest w przybliżeniu płaski. Ponadto ob-
raz ten musi być poddany przed obliczeniami procesowi filtracji
(mediana). Pomiar wynoszący około 20% różnicy minimalnej/
maksymalnej wartości został przyjęty jako odpowiedni w zależ-
ności od wartości minimalnych i maksymalnych, które pojawiają
się w pierwszej pochodnej profilu.
Algorytm wykrywania krawędzi oparty na detekcji intensyw-
ności jest przeprowadzany w zakresie lokalnego lub globalnego
wykrywania krawędzi. Detekcja lokalna polega na wyszukiwaniu
skrajnych wartości w profilu i wykorzystuje je do obliczenia loka-
lizacji punktu w profilu o określonej wartości natężenia. Detekcja
globalna przyjmuje wartość 100% na wejściu i szuka punktów,
Rys. 7
Idea detekcji krawędzi metodą wykrywania gradientu
Źródło: [2].


