vol. 5 6/2016 Inżynier i Fizyk Medyczny
332
technologie
\
technologies
artykuł naukowy
\
scientific paper
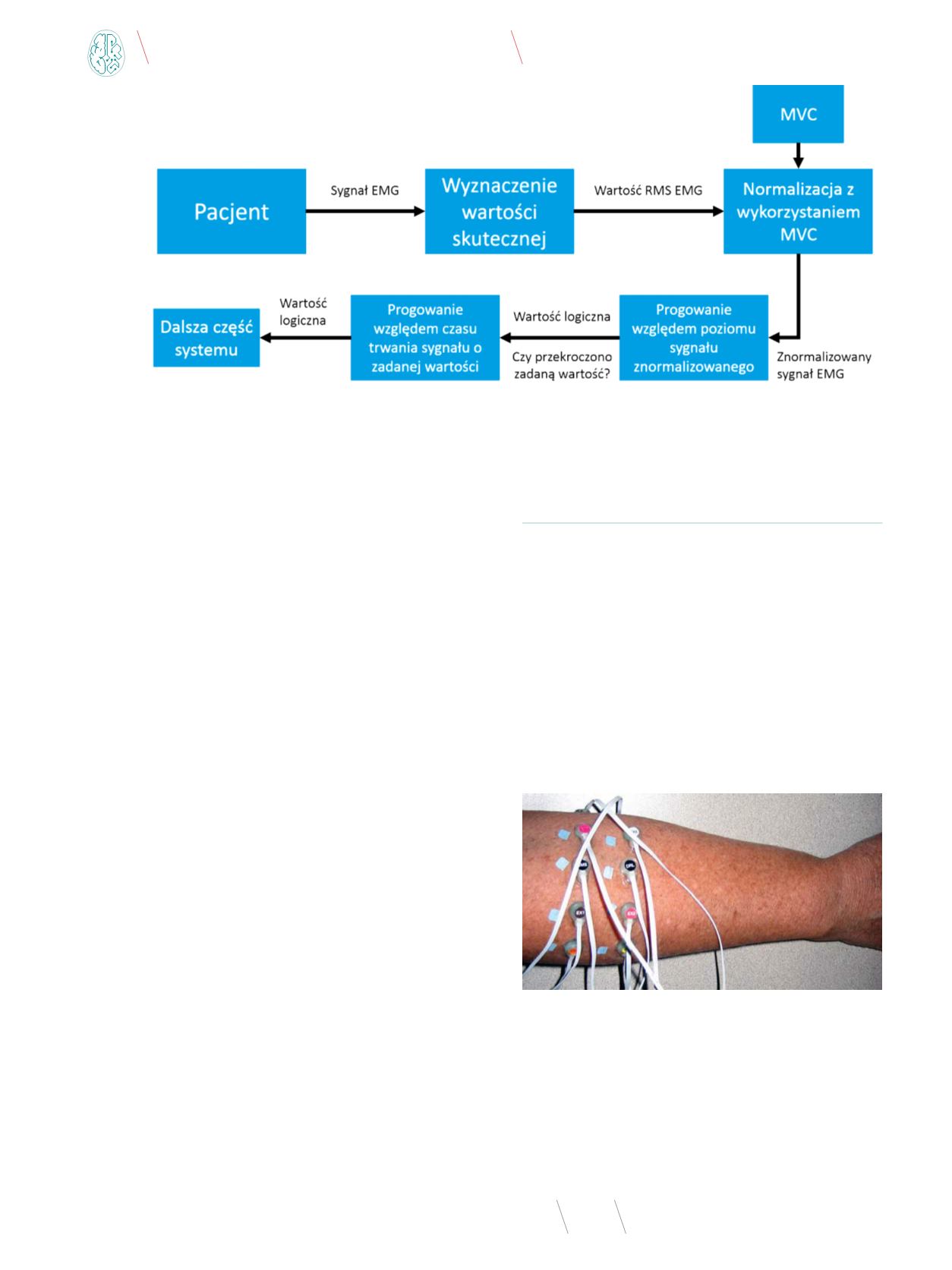
Rys. 2
. Schemat blokowy toru przetwarzania sygnału EMG w oparciu o metodę dwustopniowej dyskryminacji
Źródło: [1].
oraz adaptowanych układów decyzyjnych. Techniki te można
podzielić na 2 główne nurty. Pierwszy z nich to uczenie z nad-
zorem, w efekcie którego system na podstawie pewnego zbioru
próbek uczących ma za zadanie dostosować się do odpowied-
niego funkcjonowania i finalnie poprawnej klasyfikacji wyko-
nanych gestów. W praktyce proces ten można zrealizować jako
kalibrację systemu, w której zadaniem operatora jest wykonać
serię gestów lub ruchów w ściśle określonej kolejności. Następ-
nie system, posiadający wcześniej zaprogramowane informacje
definiujące poprawny zestaw sygnałów EMG odpowiadających
wykonanym gestom, dostosowuje swoje parametry, aby klasy-
fikacja poszczególnych gestów była jednoznaczna dla danego
operatora.
Drugi nurt to uczenie bez nadzoru, w którym system samo-
dzielnie klasyfikuje dane bez znajomości poprawnego rozwiąza-
nia. Jest to skuteczna metoda przy klasteryzacji dużych objętości
danych i dzieleniu ich na podgrupy. Tę metodę również można
zrealizować w procesie kalibracji, jednak bez wiadomej dla syste-
mu kolejności wykonanych zadań. Zadaniem systemu jest dobór
parametrów w taki sposób, aby podzielić zarejestrowane w pro-
cesie kalibracji aktywacje mięśni na określoną liczbę grup.
Algorytmy opierające się o metody klasyfikacji i rozpoznawa-
nia wzorców są znacznie bardziej zaawansowane pod względem
architektury i ilości operacji algebraicznych niezbędnych do wy-
konania, co w znacznym stopniu naraża system na wystąpienie
opóźnień w szczególności dla mniej wydajnych jednostek obli-
czeniowych. Jednak ponieważ podczas realizacji tego samego
gestu wygenerowany sygnał EMG jest za każdym razem nie-
powtarzalny, to właśnie metody oparte o uczenie maszynowe
wydają się być bardziej obiecującym sposobem postępowania.
Wynika to również z faktu, iż teoretycznie pozwalają na całko-
wite dopasowanie się systemu do sposobu wykonania gestu
przez operatora, podczas gdy analiza sygnału z wykorzystaniem
metod progowych może zmuszać użytkownika systemu do reali-
zacji niestandardowego ruchu tylko i wyłącznie w celu przekro-
czenia sztucznie zdefiniowanej wartości progowej sygnału EMG.
Przykład wykorzystania sygnałów EMG
mięśni kończyn górnych
w systemie sterowania
W niniejszym rozdziale jako przykład posłużyło badanie za-
prezentowane przez [5]. Celem stworzenia demonstrowanego
rozwiązania było oszacowanie stopnia trudności stworzenia
poprawnie funkcjonującego systemu sterowania z wykorzysta-
niem EMG w oparciu o czynności wykonywane przez poszcze-
gólne palce dłoni. Analizie poddano cztery gesty: „naciśnięcie”,
„dotknięcie”, „zmiana pozycji” oraz „uniesienie palca” wyko-
nywane przez różne palce dłoni. W sumie analizie poddano 20
niezależnych ruchów. Pomiar realizowany był przez zestaw 8 nie-
zależnych od siebie elektrod umieszczonych na przedramieniu
w sposób zaprezentowany na fotografii 2.
Fot. 2
. Rozmieszczenie elektrod w czasie badania systemu klasyfikacji ruchu palców
Źródło: [5].
Całość analizy sygnału zrealizowana została w czasie rzeczy-
wistym. W pierwszej kolejności sygnał z każdego z kanałów był
wstępnie przetwarzany. W ramach tego etapu wykorzystano
filtr pasmowo-przepustowy w paśmie 2-102 [Hz], zrealizowano
podział sygnału na próbki długości 250 [ms], następnie prze-
prowadzono ekstrakcję trzech cech z każdej z próbek. Pierwszą


