vol. 5 6/2016 Inżynier i Fizyk Medyczny
330
technologie
\
technologies
artykuł naukowy
\
scientific paper
są mało dokładne oraz wymagające wykonania znacznego prze-
mieszczenia kończyny do poprawnego działania. Co więcej, są
podatne na czynniki zewnętrzne, jak np. przemieszczenie się ca-
łego ciała, a nie jedynie kończyny odpowiadającej za wykonanie
gestu sterowania.
Tworzenie systemów opartych na odczycie i interpretację
sygnałów bioelektrycznych ma na celu pozbycie się wad, który-
mi dotychczas popularne rozwiązania typu „
motion capture
” są
obarczone. Podstawową zaletą jest oparcie działania systemu
nie na kinematyce samego ruchu kończyny, lecz na samym źró-
dle sygnału biologicznego, jakim w tym przypadku są jednostki
motoryczne danej partii mięśni. System będzie wykrywać ak-
tywność mięśni powodującą ruchy kończyn, które są zależne od
woli użytkownika. W szczególności przemieszczenie kończyny
bez woli użytkownika nie da wyraźnej odpowiedzi w postaci sy-
gnału EMG, a zatem nie zostanie odczytane jako gest sterujący.
Fakt ten eliminuje np. konieczność wykorzystania w systemie
sterowania ustalonego układu odniesienia, który definiowałby
odległość od kamery albo powoduje brak wpływu poruszania
się całego ciała operatora. Omawiana koncepcja systemu za-
pewnia niezależność od czynników środowiskowych, a źródłem
sygnałów sterujących jest bezpośrednio człowiek i jego wola
jako źródło sygnału elektrofizjologicznego.
Metodyka budowy systemu sterowania
w oparciu o sygnały EMG
Mięśnie szkieletowe z definicji podlegają całkowicie kontro-
li człowieka i są użytkowane w życiu codziennym. Dzięki temu
wykorzystanie ich działania w systemie sterowania pozwala na
stosunkowo prostą i intuicyjną modulację sygnału sterującego
(EMG). Stąd, przy właściwie skonstruowanym systemie, pojawia
się możliwość skrócenia czasu treningu niezbędnego do obsługi
danego urządzenia.
Etap pierwszy – dobór mięśni
Pierwszym z wyzwań podczas projektowania systemów stero-
wania opartych o sygnały EMG jest dobór partii mięśni, które
mają zostać wykorzystane w układzie sterowania. Wybranie
zbyt dużej liczby mięśni skutkuje koniecznością zastosowania
zbyt dużej liczby sensorów, które mogą krępować lub nawet
uniemożliwiać komfortową współpracę z danym urządzeniem.
Dlatego istotne jest dążenie do minimalizacji liczby mięśni,
z których analizowane będą sygnały EMG oraz właściwy dobór
rozmieszczenia sensorów nad mięśniami. Poprawne zrealizowa-
nie tego etapu tworzenia systemu przekłada się na komfort jego
użytkowania, a co ważniejsze zwiększa jego skuteczność.
Wybór partii mięśni oraz rozmieszczenie sensorów na ciele
operatora jest nierozłącznie powiązany z kolejnymi etapami
tworzenia systemu sterowania. W rezultacie już na wczesnym
etapie projektowania konieczna jest ocena, który z możliwych
zestawów mięśni do analizy ma szansę przynieść najlepsze
rezultaty. Decyzja ta nie jest oczywista nawet dla doświadczo-
nych badaczy. Wynika to z faktu istnienia przynajmniej dwóch
metod doboru mięśni wykorzystywanych w systemie sterowa-
nia wykorzystującym sygnały EMG.
Pierwsza metoda bazuje na doborze tych partii mięśni, które
zazwyczaj nie są aktywnie wykorzystywane w warunkach prze-
znaczonych do korzystania z urządzenia. Wykorzystując tę me-
todę przykładowo do sterowania ruchem protetycznej kończy-
ny górnej wykorzystano by sygnał EMG np. z mięśnia kończyny
dolnej. Tego typu rozwiązanie ma potencjał w przypadku zdal-
nego sterowania urządzeniami, również takimi jak różnego typu
platformy jezdne lub narzędzia, które można kontrolować przy
pomocy względnie niewielkiej liczby niezależnych komend w ro-
dzaju: „start”, „stop”, „obróć w lewo”, „obróć w prawo”, „chwyć”
itp. Operator w takim systemie pełni funkcję osoby wydającej
komendy, które wcześniej zostały precyzyjnie zdefiniowane
i których sposób realizacji przez dane urządzenie jest już z góry
zaprogramowany.
Drugą metodą, znacznie bardziej skomplikowaną w implemen-
tacji, jest rozmieszczenie czujników na partiach mięśni aktywnie
biorących udział w procesie, który chcemy wspomagać. Tego typu
system będzie określany mianem nadążnego. Jego zadaniem
będzie ciągłe monitorowanie aktywności na poszczególnych
sensorach oraz śledzenie ruchu kończyny od strony obwodo-
wego układu nerwowego, czyli aktywacji poszczególnych partii
mięśni w odpowiedniej relacji czasowej oraz amplitudowej. Tym
samym realizowana będzie estymacja kinematyki ruchu przy po-
mocy sygnałów biologicznych, a układ tego rodzaju może zostać
określony mianem biologicznego sprzężenia zwrotnego. Metoda
systemu nadążnego wymaga zdecydowanie bardziej złożonego
algorytmu przetwarzającego dane, ale równocześnie daje możli-
wość np. biomimetycznego odtworzenia ruchu kończyny dolnej
i wspomożenie go. Na rysunku 1 zaprezentowano schemat przed-
stawiający możliwe działanie tego typu systemu.
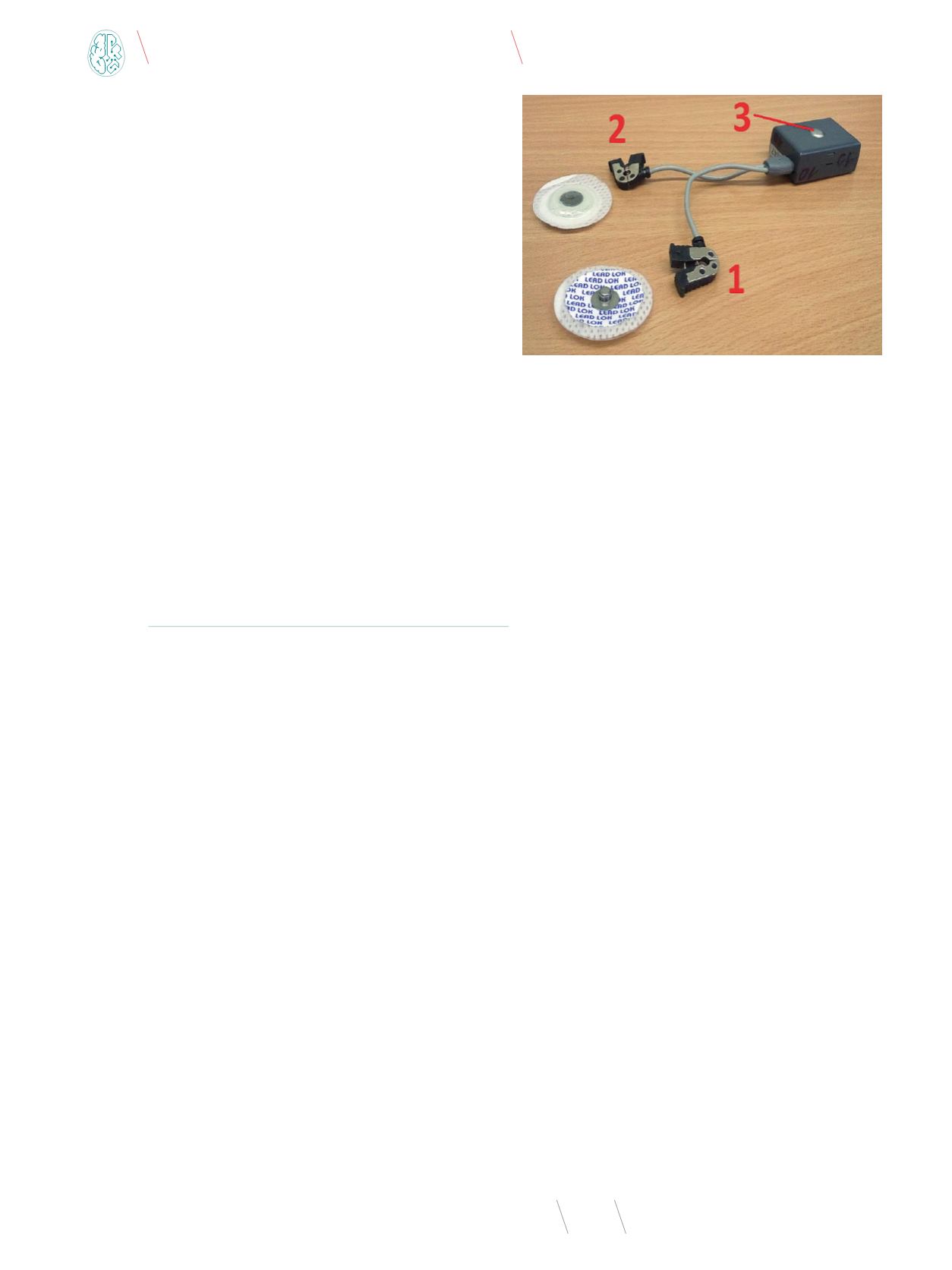
Fot. 1
. Przykład pojedynczego bezprzewodowego sensora do pomiarów EMG po-
chodzącego z zestawu Noraxon Telemyo DTS. Czujnik wykorzystuje metodę pomia-
ru różnicowego z wykorzystaniem 3 elektrod – aktywnej (1), referencyjnej (2) oraz
uziemiającej (3)
Źródło: Opracowanie własne.


